ScoutMega Printbot
 von jotauve
von jotauve









Druckbare Dateien (6)
-
 stl
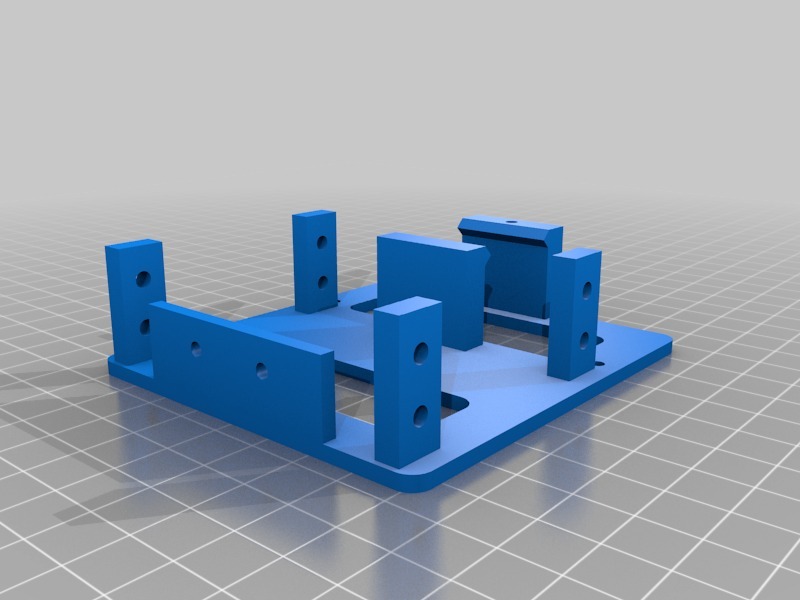
stlchassis-v2.stl
746 Ko · 1 052 Downloads
-
 stl
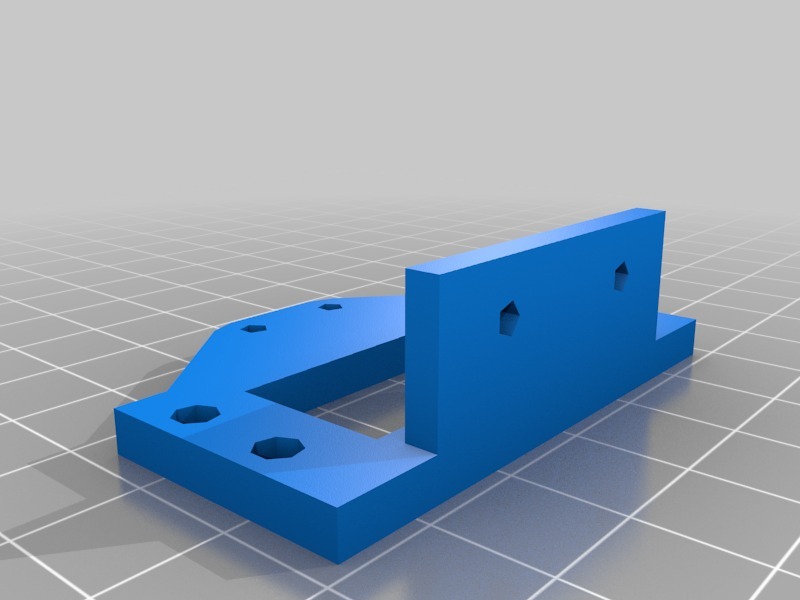
stlgripper-anchorage.stl
62 Ko · 1 049 Downloads
-
 stl
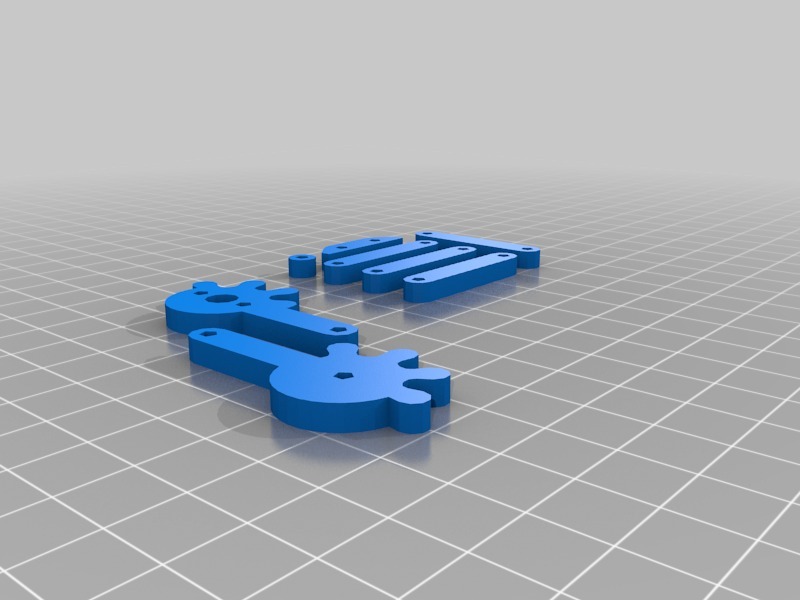
stlgripper-pieces.stl
272 Ko · 1 056 Downloads
-
 stl
stlMiniSkybot_castor_wheel_p1.stl
1.2 Mo · 1 020 Downloads
-
 stl
stlMiniSkybot_castor_wheel_p2.stl
136 Ko · 1 045 Downloads
-
 stl
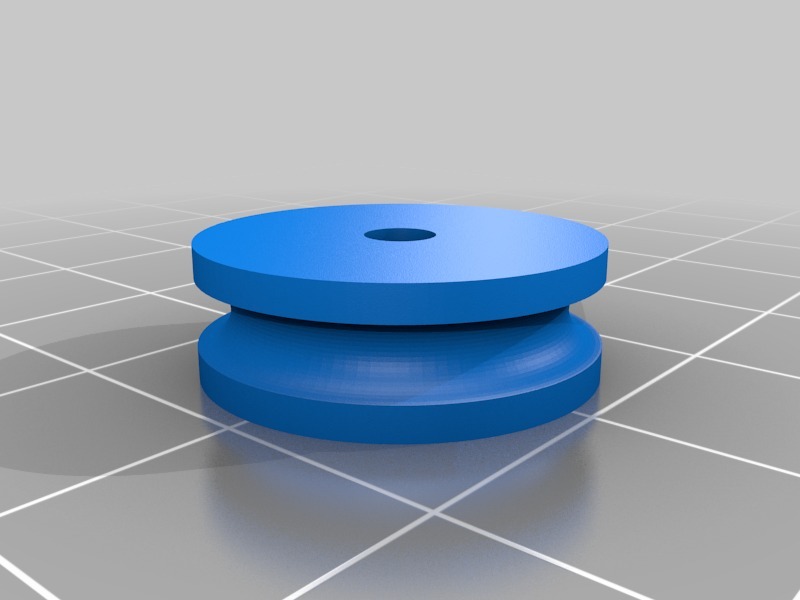
stlMiniskybot-Servo-wheel.stl
487 Ko · 1 043 Downloads
Beschreibung
In this case, the SCAD code of the Scout printbot has been converted into OOML code ( iearobotics.com/oomlwiki/doku.php ). At the same time, the ScoutMega printbot derives from the MiniSkyBot ( thingiverse.com/thing:7989 ) by Obijuan ( thingiverse.com/obijuan ). The castor wheel in the rear part is the same as in the MiniSkyBot, but the OOML version ( thingiverse.com/thing:12198 ) by avalero ( thingiverse.com/avalero ) was employed.
Here is a small video (in spanish): http://www.youtube.com/watch?v=821ua42vHks
The main design is the same as the Scout printbot, but an additional front bumper has been included in order to mount on it a gripper. The gripper selected is a modification of the one posted in ( thingiverse.com/thing:2415 ).
The electronics consists on an Arduino Mega board and 3 Futaba S3003 servos (for both wheels and gripper).
In the attached files, all the source code is provided: SCAD files and STL. There is algo a C++ file in which it is the code of the chassis using the OOML.
Additional things:
To assemble everything, you will need at least:
- 11 M3x8mm screws.
- 4 M3x20mm screws.
- 14 M3 nuts.
- 2 O-ring: 50x3 mm.
- 1 O-ring 16x3 mm.
Realize that for the gripper I just used some plastic wire. You can do this as well but if you want to use screws (for a more robust coupling), you will need:
- 6 M3x6mm screws.
- 6 more M3 nuts.
TO DO:
The gipper is too big according the size of the chassis. This make the printbot unstable sometimes.
Change the design to make it easier to assemble.
- Improve the gripper anchorage. Right now it is very difficult to assemble.
I'm sorry about this issues. That is what happens when an electronic design mechanics :)