Robot3
 por Ghost384904
por Ghost384904











Archivos imprimibles (10)
-
 stl
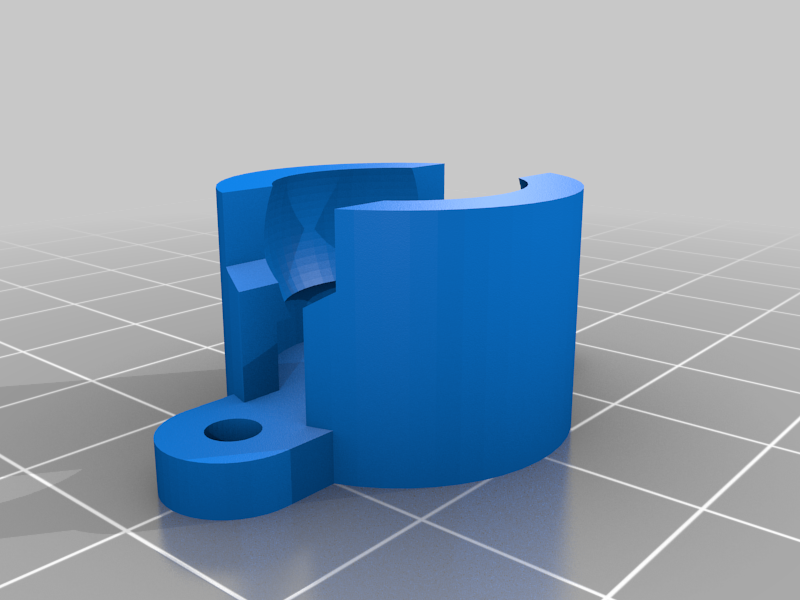
stlCaster.stl
117 Ko · 458 descargas
-
 stl
stlServoWheelHolder4.stl
67 Ko · 425 descargas
-
 stl
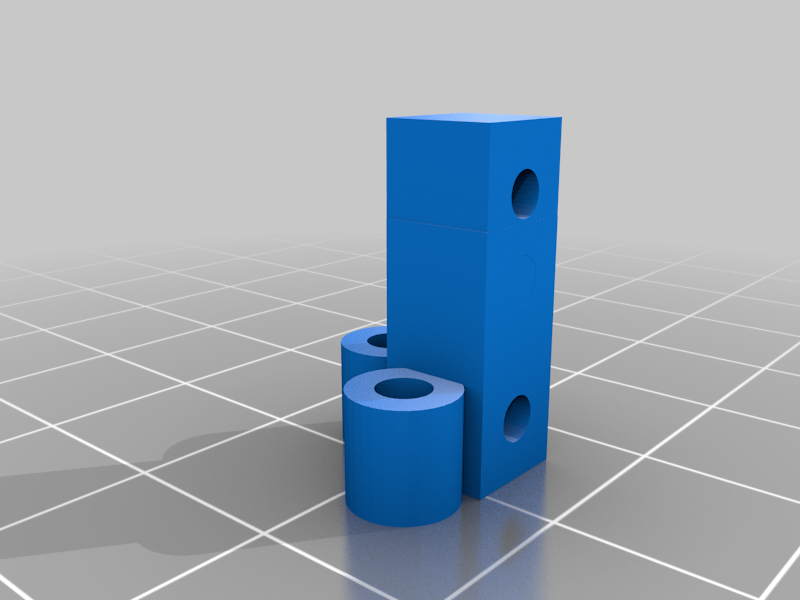
stlServo_mount1_1.stl
56 Ko · 440 descargas
-
 stl
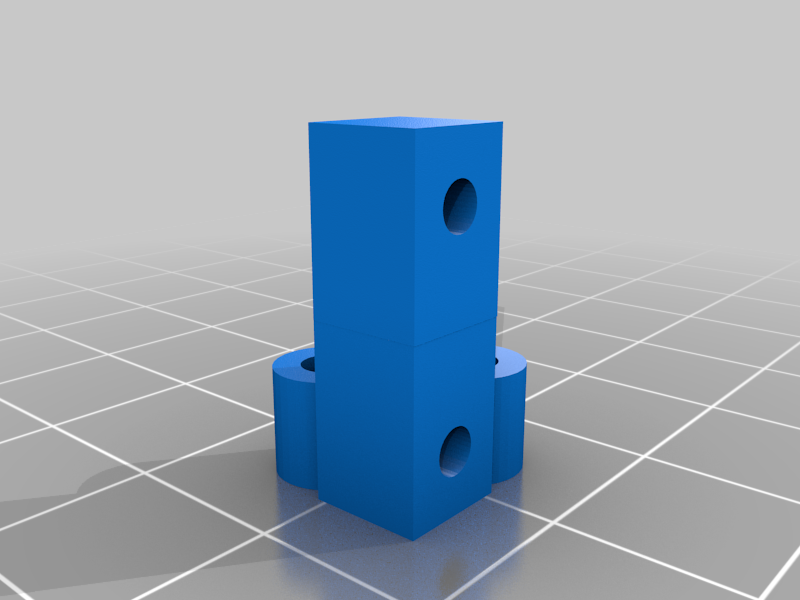
stlServo_mount2_1.stl
46 Ko · 435 descargas
-
 stl
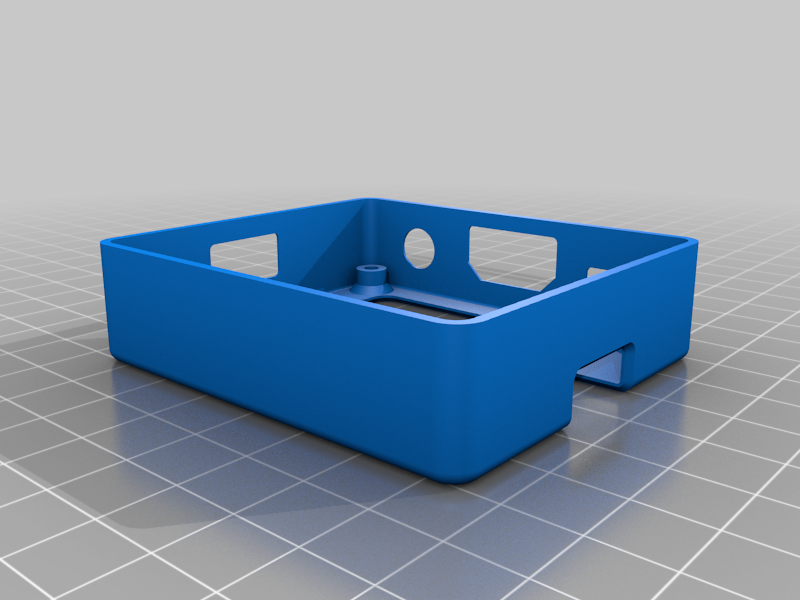
stlRaspberry_Pi_A+_Casepiaplus-case.stl
735 Ko · 435 descargas
-
 stl
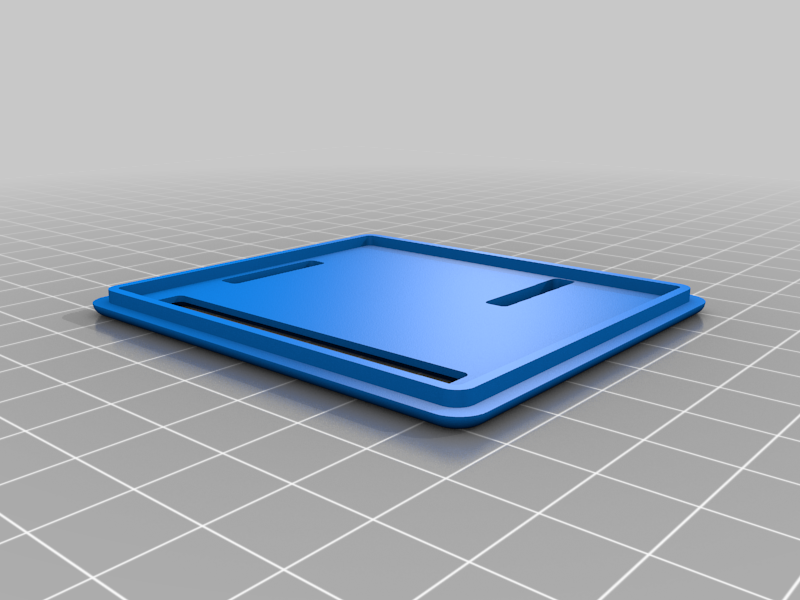
stlRaspberry_Pi_A+_Casepiaplus-top.stl
276 Ko · 436 descargas
-
 stl
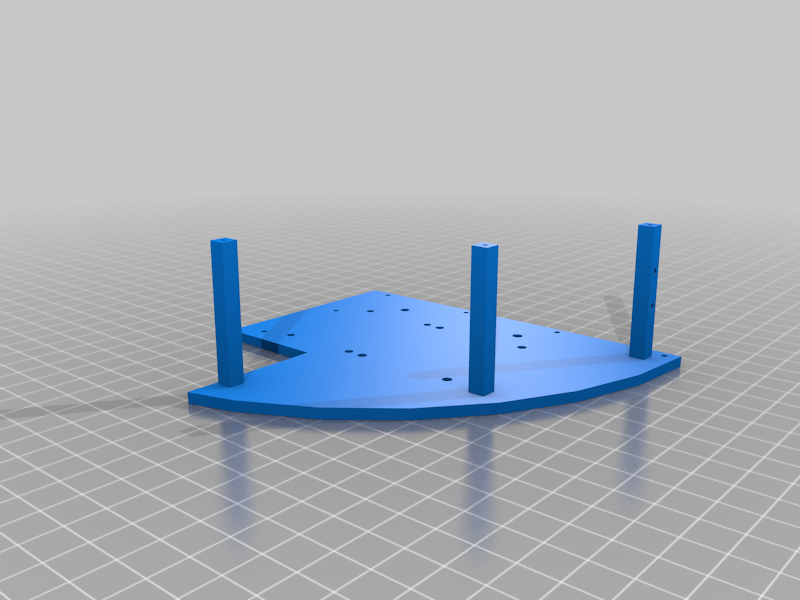
stlRoombaBody8LeftBack.stl
141 Ko · 475 descargas
-
 stl
stlRoombaBody8RightBack.stl
203 Ko · 464 descargas
-
 stl
stlRoombaBody7RightBack.stl
84 o · 438 descargas
-
 stl
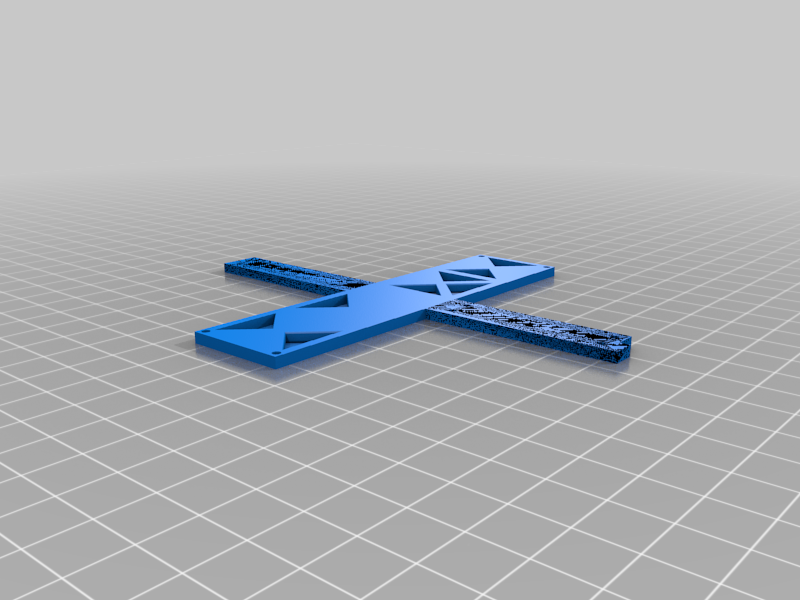
stlRoombaHalvesConnectersWOSwitch.stl
103 Ko · 428 descargas
Descripción
Robot3 is the 3rd robot I've built this is a work in progress still cause I don't have bumpers finished and my mapping code needs to be done with a different library probably Python's Canvas library. Also might add TFT lcd for starting, stopping, and different functions. The Robot body can be mirrored to get all sides and the halves joiner can be customized for your size.
-Arduino Uno
-Raspberry Pi A+
-Ultrasonic Ping sensor
-2x Button sensors
-Sharp ir distance sensor
-Seed Studio motor shield
No I don't use encoder cause previous tests showed encoders need a tolerance for any carpet it hits and one of the wheels continues to spin throwing off SLAM mapping.