Harmonic Drive
 por Alphie
por Alphie










Archivos imprimibles (7)
-
 stl
stlbearing_rotor_cap.stl
109 Ko · 4 455 descargas
-
 stl
stlbottom_shell.stl
715 Ko · 4 425 descargas
-
 stl
stlbearing_large.stl
627 Ko · 4 438 descargas
-
 stl
stlmini_bearing.stl
1.1 Mo · 4 438 descargas
-
 stl
stlflex_spline.stl
3 Mo · 4 463 descargas
-
 stl
stlcircular_spline.stl
231 Ko · 4 435 descargas
-
 stl
stlbearing_rotor.stl
217 Ko · 4 406 descargas
Descripción
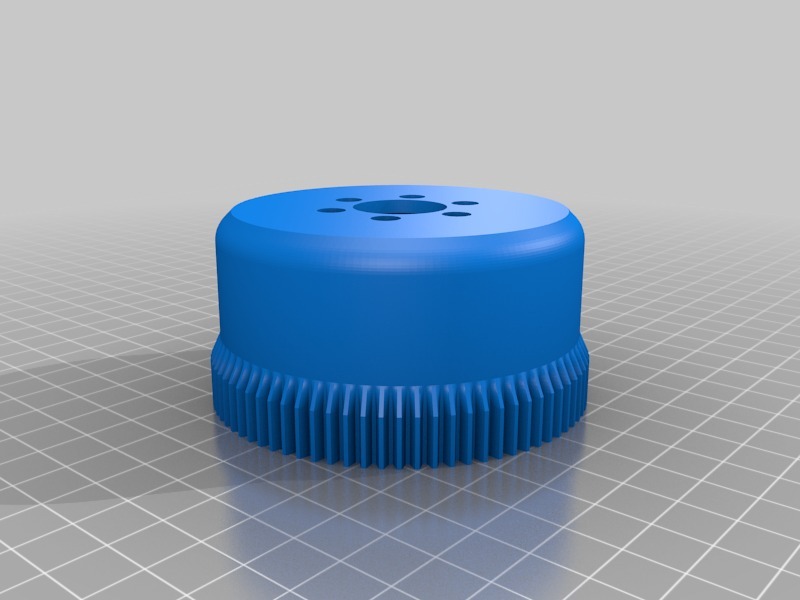
My goal was to implement the principle of the harmonic drive into a sturdy solid module that can ultimately be used for making a robotic arm. This is my first prototype, and it works quite nicely.
http://youtu.be/D_neLbcW_BY
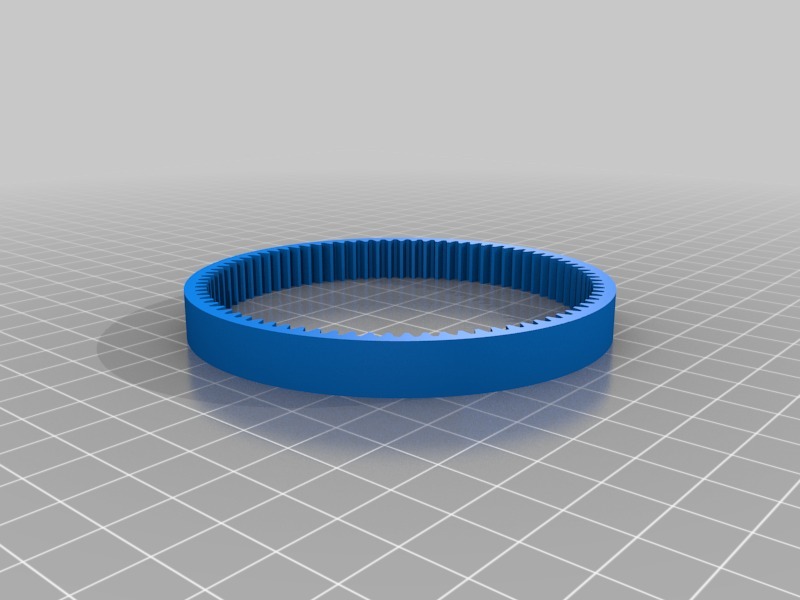
The circular spline has 84 teeth. The flex spline (80 teeth) has been printed with flexible PLA. All other parts were printed with regular PLA. The bearing balls are made of copper and are 3.2 mm in diameter in size.
The large bearing needs some work to get a good fit. It is currently too tight when 100% filled with bearing balls.
Print settings (ultimaker)
-0.1 mm @ 25-50mm/s
-nozzle (0.4 mm) temp 225 degC
-bed: 65 degC
-0.1 mm @ 25-90mm/s depending on structure (25 for gears)
Have Fun!