SMARS ZERO V4
 por tristomietitoredeituit
por tristomietitoredeituit

















Ficheiros imprimíveis (5)
-
 stl
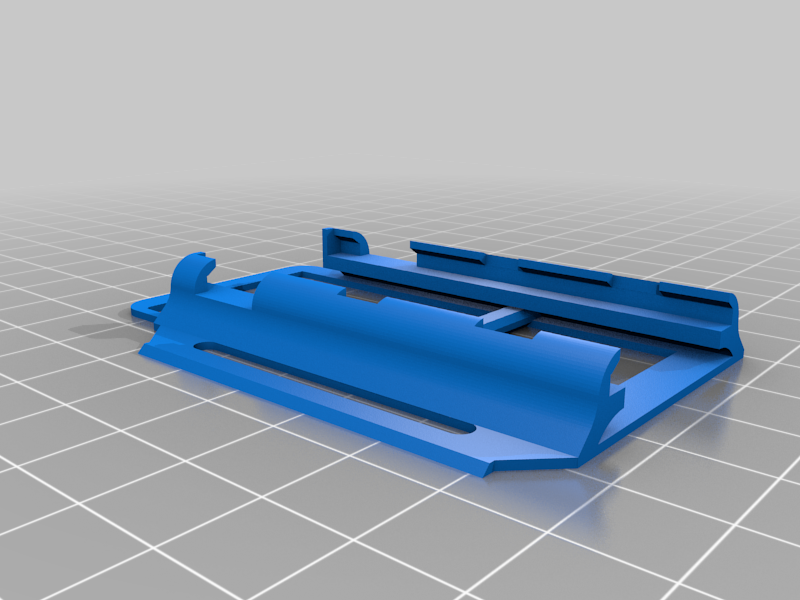
stlholding_board.stl
126 Ko · 4 111 descargas
-
 stl
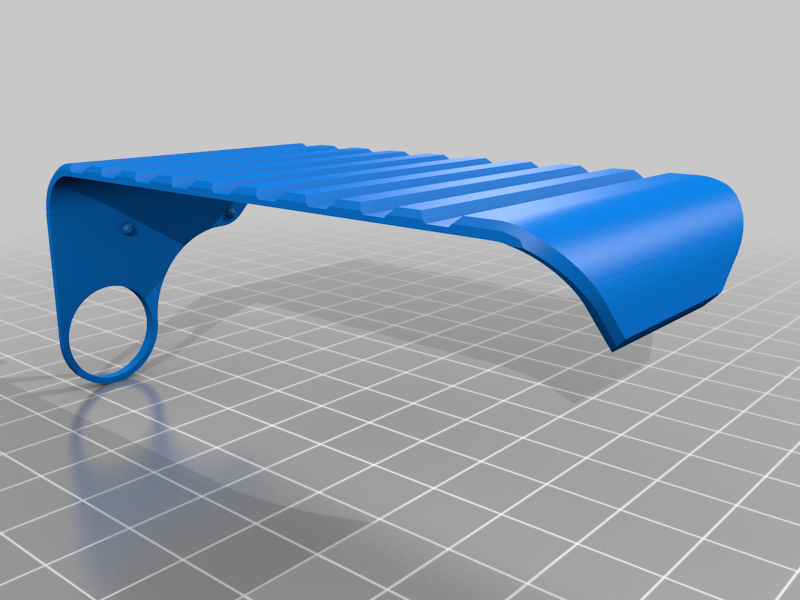
stlupper_shell.stl
1.1 Mo · 4 104 descargas
-
 stl
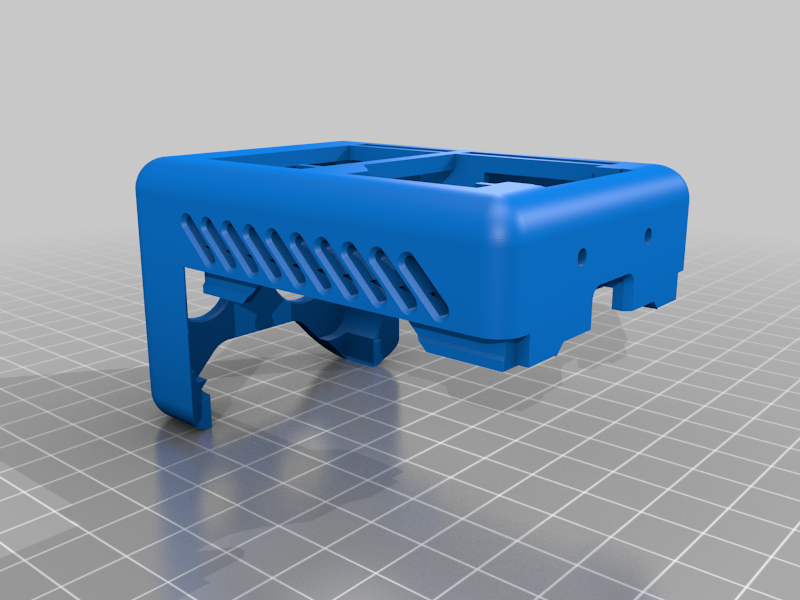
stlpi_power_holder_b.stl
2.4 Mo · 4 105 descargas
-
 stl
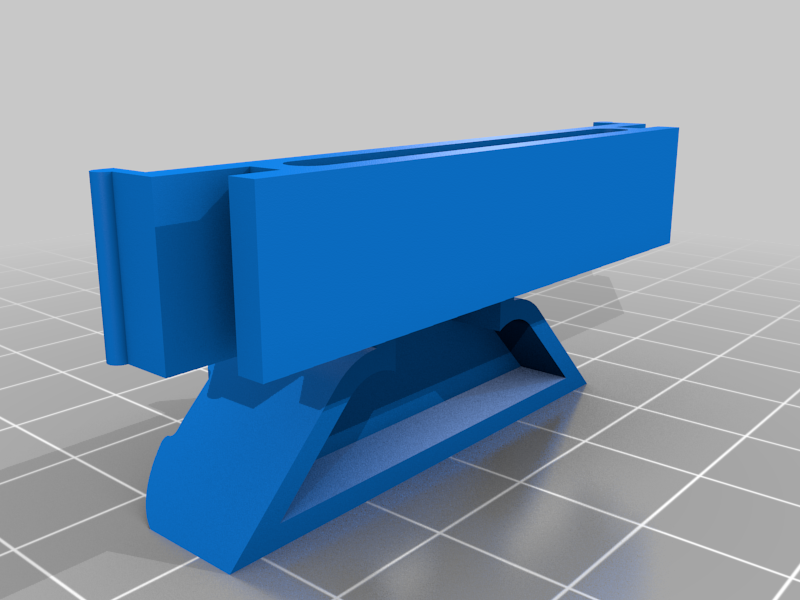
stlfront_lock.stl
1.4 Mo · 4 088 descargas
-
 stl
stlmotordriver_holder.stl
17 Ko · 4 103 descargas
Descrição
Here you have the second Rpi version of SMARS Zero! This model is designed to be an UGV and is a remix of the Zerobot project.
The main features of this upgrade are the night vision mode and the USB rechargeable built in battery. To build it you will need the following components:
motor driver https://amzn.to/2PK0lVg (only if you are not using a SMARS V4 chassis)
http://s.click.aliexpress.com/e/RQSXsiM
camera https://amzn.to/2Laaf1L
http://s.click.aliexpress.com/e/ccCLrgXq
RPi https://amzn.to/2UwlvtQ
http://s.click.aliexpress.com/e/biTiI0fm
battery holder: https://amzn.to/2YKEdUj
http://s.click.aliexpress.com/e/cPe8uFgG
Battery https://amzn.to/2Kt3CsI
http://s.click.aliexpress.com/e/c78YLggu
SMARS V4 https://cults3d.com/en/3d-model/gadget/smars-v4
or
SMARS basic version https://goo.gl/pzx6fs (you need to print the motor driver holder)
PRO Tracks https://www.thingiverse.com/thing:3807011
For the software, you can follow the tutorial of the original Zerobot: https://goo.gl/4tcDFm
you'll probably have to rotate the camera image, to do this you just have to open the file /etc/rc.local in a text editor and remove the expressions "-vf" and "-hf" from this line: LD_LIBRARY_PATH=/opt/mjpg-streamer/ /opt/mjpg-streamer/mjpg_streamer -i "input_raspicam.so -vf -hf -fps 15 -q 50 -x 640 -y 480" -o "output_http.so -p 9000 -w /opt/mjpg-streamer/www" > /dev/null 2>&1&"
Many thanks to Wingman94 for the great software and the amazing idea!