ArdumowerROS Turtlebot
































Fichiers imprimables (20)
-
 stl
stlBumper1.stl
104 Ko · 207 téléchargements
-
 stl
stlBumper1_right.stl
100 Ko · 206 téléchargements
-
 stl
stlspacer-right.stl
334 Ko · 207 téléchargements
-
 stl
stlback_right.stl
395 Ko · 205 téléchargements
-
 stl
stlRPI_Spacer.stl
404 Ko · 209 téléchargements
-
 stl
stlStützrad.stl
116 Ko · 209 téléchargements
-
 stl
stlspacer-left.stl
334 Ko · 207 téléchargements
-
 stl
stlFront-Spacer.stl
167 Ko · 205 téléchargements
-
 stl
stlFront-right.stl
385 Ko · 208 téléchargements
-
 stl
stlBumper3.stl
47 Ko · 207 téléchargements
-
 stl
stlBumper2.stl
43 Ko · 207 téléchargements
-
 stl
stlMotorhalter-2.stl
193 Ko · 213 téléchargements
-
 stl
stlback-left.stl
290 Ko · 209 téléchargements
-
 stl
stlFront-Middle.stl
211 Ko · 206 téléchargements
-
 stl
stlMotortreiber.stl
150 Ko · 206 téléchargements
-
 stl
stlRear-Spacer.stl
168 Ko · 207 téléchargements
-
 stl
stlPCB-Bracket.stl
278 Ko · 207 téléchargements
-
 stl
stlMotorhalter-1.stl
146 Ko · 210 téléchargements
-
 stl
stlNot-Aus.stl
217 Ko · 207 téléchargements
-
 stl
stlPCB-Bracket-Small.stl
231 Ko · 207 téléchargements
Description
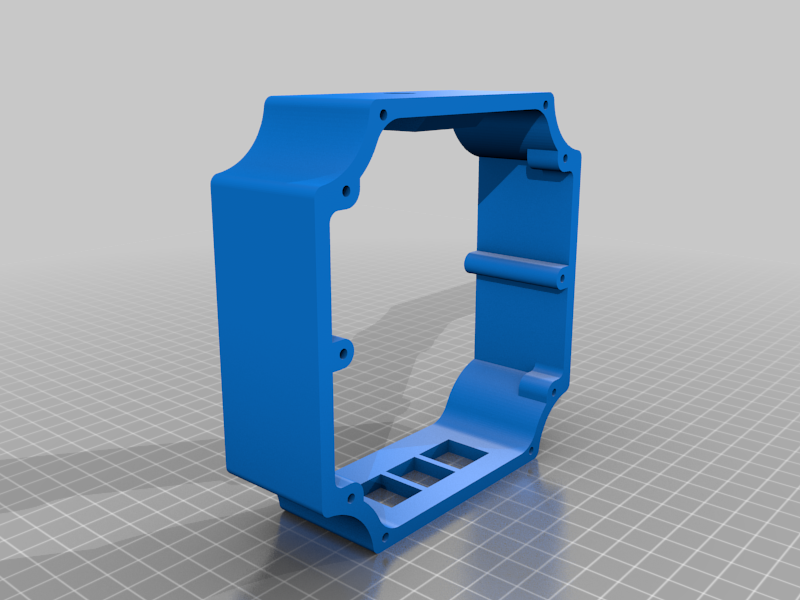
This is a ROS turtle bot which uses ROS Waffles (either print them or purchase them).
I designed this to fit the Ardumower PCB, which I use for low level firmware (Arduino).
On top of the robot, a RPI is used to run ROS either as a remote node (ROS Master runs on a PC), or as a standalone ROS Master. Firmware is not ready, so don't ask for it.
But the robot body itself is ready and runs good with origin Ardumower firmware.
I use this motors with encoders
https://www.aliexpress.com/item/32946445527.html?spm=a2g0s.9042311.0.0.73804c4dPLhk5U
You can use it for any other robotic project as well. Thanks to ROS waffles, it is incredible modular
Git Repository can be found here
https://github.com/PaddyCube/ArdumowerROS