Bipedal walking unit for Stackchan
 par mongonta555
par mongonta555







Fichiers imprimables (7)
-
 stl
stlcenter_support_front.stl
46 Ko · 75 téléchargements
-
 stl
stlcenter_support_rear.stl
48 Ko · 74 téléchargements
-
 stl
stlinshell.2.stl
214 Ko · 75 téléchargements
-
 stl
stlFoot_L_long.2.stl
187 Ko · 44 téléchargements
-
 stl
stlFoot_R_long.2.stl
161 Ko · 46 téléchargements
-
 stl
stlLeg_L.stl
674 Ko · 43 téléchargements
-
 stl
stlLeg_R.stl
665 Ko · 43 téléchargements
Description
This is a diff of the following thing arranged.
・Foot_L.stl
・Foot_R.stl
・Leg_L.stl
・Leg_R.stl
・Spur_Gear_8_teeth.stl
Please get the above five files from the original.
https://www.thingiverse.com/thing:5233589
This is a set of option parts for Stackchan, that gives Stackchan bipedal walking ability.
Stackchan is originally designed and developped by Shinya Ishkawa (@meganetaaan).
See the following link for details of Stackchan: https://github.com/meganetaaan/stack-chan
This model requires:
M5Stack (Core Basic, Gray, Go, Fire, Core2)
Servo module for M5Stack
M5Go Bottom or GoBottom
SG90 servo motor (x 4)
M2x15mm screw + appropriate washer
Stackchan Body for SG90 and Go Bottom (https://github.com/meganetaaan/stack-chan/tree/main/case/contributed/mongonta_case_for_SG90_and_M5GoBottomBoard/case_for_SG90andM5GoBottomBoard)
[Note]: Servo Module for M5Stack is not available (EOL) in M5Stack official shop. Unfortunately currently available Servo2 Module is not suitable for this stl model because of its size, position and size of inlet of external power.
The walking unit option is not fit for the original stackchan body. Please use the revised model for SG90/Go Bottom shown above. You have to cut some bosses for fixing servo horn for tilting Stackchan to install inner shell with leg parts.
Arduino library "M5Stakc_Avatar" by Shinya Ishikawa (https://registry.platformio.org/libraries/meganetaaan/M5Stack-Avatar ) is used to show kawaii face in the sample movie.
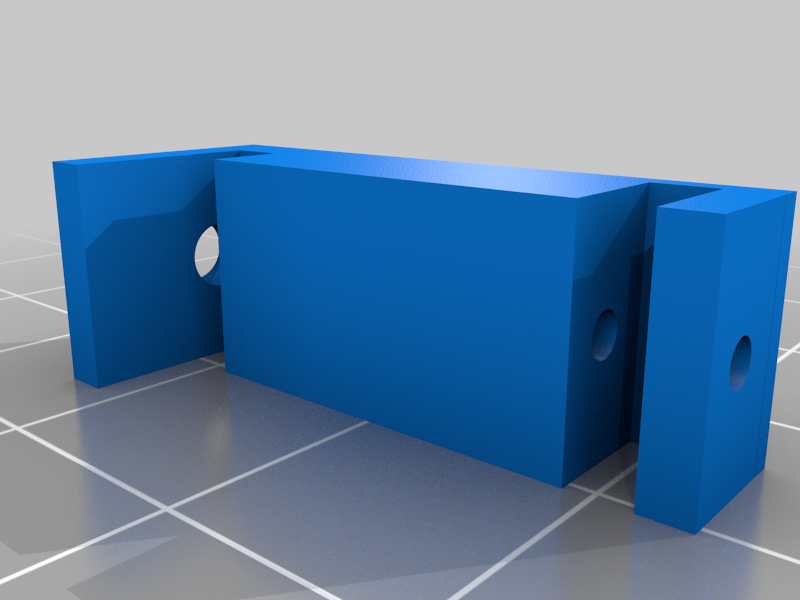
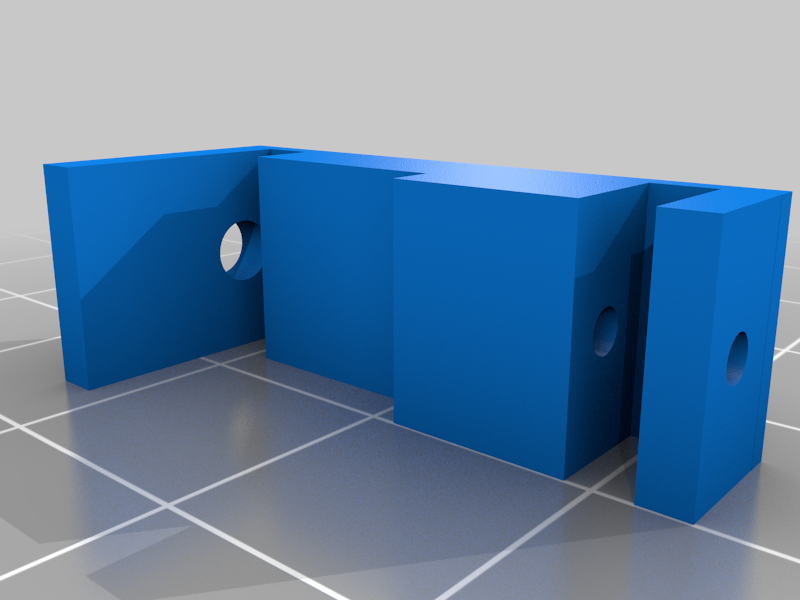
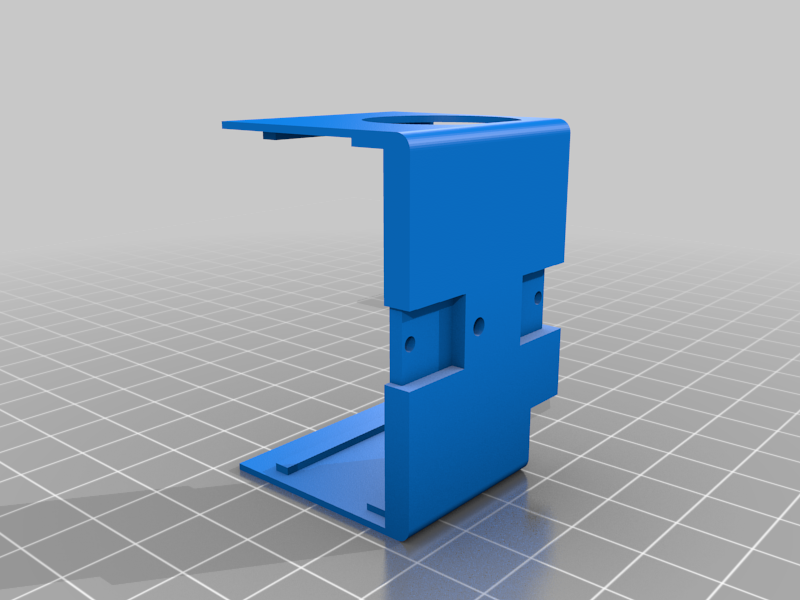
Please refer the pictures to assemble the unit and install it to Stackchan.
an example of servo rotation pattern to move Stackchan forward:
// servo angles of Center, left foot, right foot
{50, 90, 90}; // initial values
{50, 95, 120}, // shifting center of gravity to left
{130, 95, 120}, // moving right leg forward
{130, 90, 90}, // shifting center of gravity to center
{130, 60, 85}, // shifting center of gravity to right
{50, 60, 85}, // moving left reg forward
{50, 90, 90}, // shifting center of gravity to center
Thank you, and hope you enjoy the model.